概念:
(1)单点动态定位 它是用安设在一个运动载体上的GPS接收机,自主地测得该运动载体的实时位置,从而描绘出运动载体的运行轨道。所以单点动态定位又叫做绝对动态定位。
(2)实时差分动态定位 客观存它是用设安在一个运动载体上GPS信号接收机,及安设在一个基准站之间的另一台GPS接收机,联合测得该运动载体的实时位置,从而描绘出该运动载体的运行轨道,故差分动态定位又称相对动态定位。
(3)后处理差分动态定位 它和实时差分动态定位的主要差别在于,在运动载体和基准站之间,不必像实时动态定位那样建立实时数据传输,而是在定位观测以后,对两台GPS接收机所采集的定位数据进行测后的联合处理,从而计算出接收机所在运动载体在对应时间上坐标位置。
6.2.1 单点动态定位
单点动态定位的基本方程为:

其中Xu,Yu,Zu为动态用户在tk时刻的瞬时位置;Xj,Yj、Zj是弟j颗GPS卫星在其运动轨道上瞬时位置,它可根据广播星历计算:p/j为码接收机所测得的GPS信号接收天线和第j颗GPS卫星之间的距离,即站星距离;d是由于接收机时钟误差等因素所引起的站星距离偏差。
利用(6-1)解算用户位置时,不是直接求它的三维坐标,而是求各个坐标分量的修正量,即给定用户三维坐标的初始值(Xu,Yu,Zu),而求解三维坐标的改正值△Xu,△Yu,△Zu和距离差d。对(6-1)式中Xu,Yu,Zu分别微分,便得到线性方程:

6.2.2 伪距差分动态定位
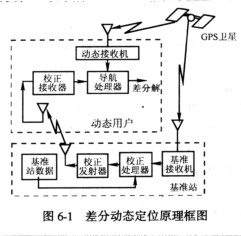
所谓差分动态定位(DGPS),就是用两台接收机在两个测站上同时测量来自相同GPS卫星的导航定位信号,用以联合测得动态用户的精密位置。其中一个测站是位于已知坐标点,设在该已知点(又称基准点)的GPS信号接收机,叫做基准接收机。它和安装在运动载体上的GPS信号接收机(简称为动态接收机)同时测量来自相同GPS卫星的导航定位信号。基准接收机所测得的三维位置与该点已知值进行比较,便可获得GPS定位数据的改正值。如果及时将GPS改正值发送给若干台共视卫星用户的动态接收机,而改正后者所测得的实时位置,便叫做实时差分动态定位。图6-1为差分动态定位的原理框图。
由式(6-1)可知,基准站R测得至GPS卫星j的伪距为:


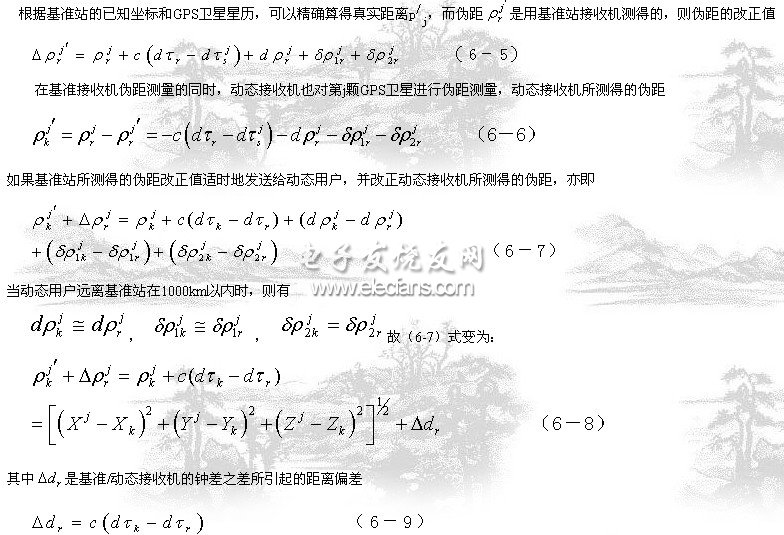
如果基准/动态接收机各观测了4颗GPS卫星,则按(6-8)列出4个方程式,可解出4个未知数(Xk,Yk,Zk,△dr)。
6.2.3动态载波相位差分测量


当动态用户和基准站各用一台双频接收机进行载波相位测量时,低则可有效地提高动态定位的实时位置精度。在此情况下,参照式(6-10)和式(6-11),则知载波L1和L2的剩余相位观测值为:

根据式(6-11)的解算方法,即可由上式算出载波相位双频观测后的动态用户位置估值的改正数。