车载摄像装置主要是由CCD摄像机、图像采集卡、光源等设备组成。
2015-11-20 13:58:49 8217
8217 设计一种价格低廉、实时性高的双向汽车防盗系统显得尤其重要,下文便介绍一款汽车防盗系统中起至关重要作用的硬件电路设计。
2016-12-09 16:04:216598 本文主要介绍了断水报警器电路设计方案汇总(四款模拟电路设计原理图详解)。该断水报警器电路由断水检测电路和声光报警电路组成,断水检测电路由晶体管、电位器和电阻器等组成。声光报警电路由晶体管、发光二极管
2018-01-29 09:13:189114 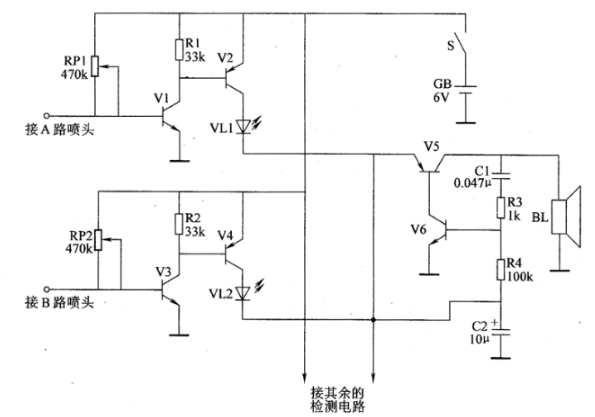
本文主要介绍了采样保持电路图大全(五款采样保持电路设计原理图详解),采样保持电路(采样/保持器)又称为采样保持放大器。当对模拟信号进行A/D转换时,需要一定的转换时间,在这个转换时间内,模拟信号要保持基本不变,这样才能保证转换精度。采样保持电路即为实现这种功能的电路。
2018-02-23 09:59:4495716 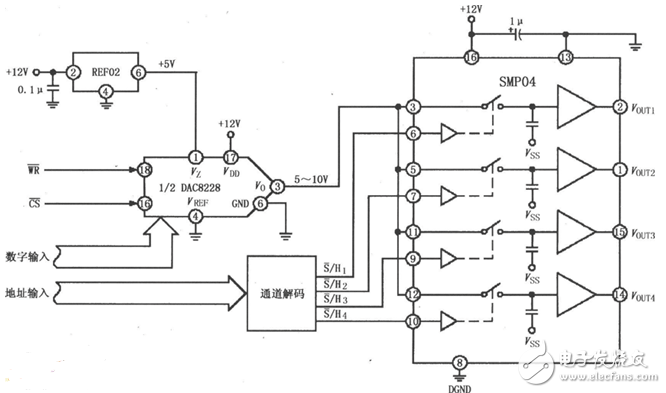
详解“优化整个电路设计的原理图”主要涉及的几个问题
2019-05-18 07:28:007860 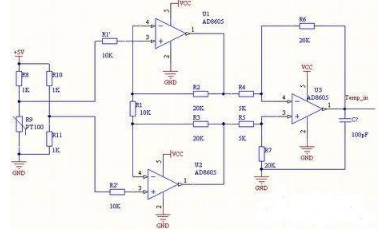
晶体与晶振在电路设计中的应用十分广泛,对于数字电路,一个稳定的时钟信号,是系统稳定的前提。
2023-11-22 10:44:48526 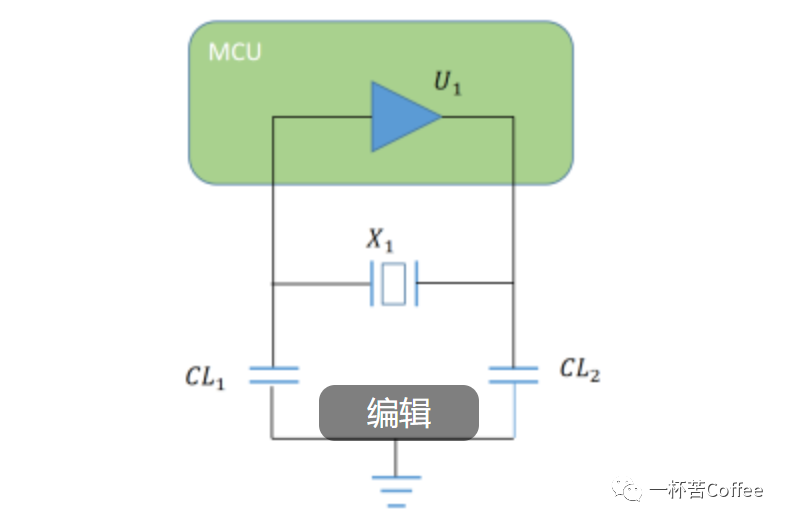
本文主要介绍了电流检测电路设计方案汇总(六款模拟电路设计原理图详解),采用差分运放进行高端电流检测的电路更便于使用,因为近期推出了许多种集成电路解决方案。专用高端检流电路内部包含了完成高端电流检测
2018-02-06 11:31:39322983 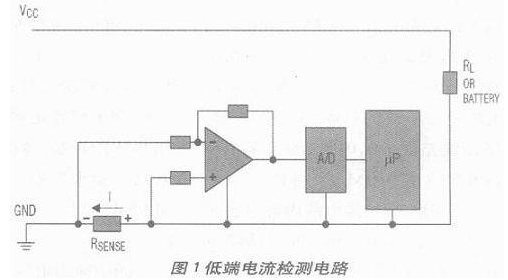
电路设计,适合大家的借鉴和应用。
2014-02-17 19:49:16
主要针对UC3844驱动电源与外围电路详解,包括主电路、外围电路、电流反馈电路、电压反馈电路;
2019-03-26 17:24:30
本帖最后由 eehome 于 2013-1-5 09:57 编辑
电路设计知识
2012-05-30 08:37:02
号外!号外!原价972元的正版原装"张飞实战电子硬件电路设计1-13部视频教程",现在只要1.99元!添加客服即可直接购买!点击链接扫描二维码添加客服http
2021-12-13 16:29:31
热量管理是所有电路设计人员都关心的一个问题,特别是针对大信号时。在射频/微波电路中,大信号常见于功率放大器和系统发送端元件。不管是连续波(CW)信号还是脉冲信号,如果产生的热量得不到有效疏导,它们都将导致印制电路板(PCB)上和系统中的热量积聚。对电子设备来说,发热意味着工作寿命的缩短。
2019-06-21 07:49:33
`车载汽车电子装置是汽车环境下能够独立使用的电子装置。其实车载汽车电子装置与汽车本身的性能并没直接关系。它包括GPS导航系统、汽车音响、汽车信息系统、电视娱乐系统、上网设备和车载通信系统等。这些汽车
2017-06-07 15:20:15
一款常见车载逆变器电路及原理
2019-09-20 08:18:20
一款常见车载逆变器电路及原理
2019-10-30 09:10:52
车载防盗系统的检测模块用什么电路?
2013-03-24 13:51:01
ADS应用详解-射频电路设计与仿真
2020-05-13 09:28:32
AT89C51系列单片机烧写器电路设计详解DIY
2012-12-20 22:51:54
《LED照明驱动电路设计与实例精选》比较好的一本书
2014-03-12 16:57:47
电路设计参考.pdfMOS管驱动电路设计秘籍(工作原理+电路设计+问题总结)/MOS管电路工作原理及详解.ppt2516KBMOS管驱动电路设计秘籍(工作原理+电路设计+问题总结)/mos管驱动电流计
2020-07-23 17:22:15
)/MOSFET驱动电路设计参考.pdfMOS管驱动电路设计秘籍(工作原理+电路设计+问题总结)/MOS管电路工作原理及详解.ppt2516KBMOS管驱动电路设计秘籍(工作原理+电路设计+问题总结)/mos管
2020-07-21 18:52:16
电子发烧友总结了以“运算放大器”为主题的精选干货,今后每天一个主题为一期,希望对各位有所帮助!(点击标题即可进入页面下载相关资料)运算放大器(简称“运放”)是具有很高放大倍数的电路单元。在实际电路中
2019-05-29 18:10:49
电子发烧友总结了以“PFC电路”为主题的精选干货,今后每天一个主题为一期,希望对各位有所帮助!(点击标题即可进入页面下载相关资料)PFC控制电路设计(工作原理+芯片应用+电路图)PFC电路详解PFC
2019-04-17 17:44:50
电子发烧友总结了以“推挽电路”为主题的精选干货,今后每天一个主题为一期,希望对各位有所帮助!(点击标题即可进入页面下载相关资料)一种双变压器串联谐振软开关推挽电路推挽式逆变器原理讲解正激推挽电路
2019-04-24 16:34:52
电子发烧友总结了以“ 自举电路”为主题的精选干货,今后每天一个主题为一期,希望对各位有所帮助!(点击标题即可进入页面下载相关资料)CPU供电的MOS管自举电路设计自举驱动buck电路的缓慢下电问题与解决功率驱动集成电路中自举元件的选择前级驱动电路设计——自举电容半桥驱动电路——自举电容电路讲解
2019-04-22 14:46:56
本榜单汇总了2022年#电路设计论坛下载量最高的5份资料,每份资料都有推荐理由,希望对各位开发者朋友们有所帮助!1、精选实用电子电路260例作者 :X学无止境下载量 :359推荐理由 :精选260例
2023-01-10 17:02:39
在2023年,电路设计论坛发布了一系列精选资料,每个资料都凝聚了开发者们的智慧和经验。这些资料涵盖了电路设计的不同领域。如果你在开发过程中遇到了难题,或是想要深入了解电路设计的某个方面,这些精选资料
2024-01-17 15:04:30
+百元京东卡任性大派送!北京攻城狮们,动起来!与行业大咖面对面探讨“应用层通信安全”精选电路设计资料:各类传感器工作原理图解析合集(共80个)资深电工总结常见电路讲解资料集高速MOSFET栅极驱动电路
2019-03-15 17:07:35
,分析了测速、测距和测向的基本原理。第六章主要对整个系统链路指标进行了分析,其中包括接受灵敏度和发射功率等,进一步说明了 77GHz 车载雷达系统的可行性,并对射频前端电路进行了加工和测试,为后续工作积累经验。下载地址:[hide]77GHz车载雷达现状趋势及总体电路设计实现方案[/hide]
2017-06-28 11:36:35
本期电子发烧友《射频工程师必备的滤波器电路设计》为您讲解滤波电路的设计与运用。从概念分析到简单电路设计再到电源滤波电路设计,让您一步一步,从简到繁,系统的学习滤波电路设计相关知识。你能从
2020-07-27 09:37:18
、压控振荡器——射频电路必不可少的组成部分。 收发机——代表几乎所有的通信系统模型。内容简介 本书介绍使用ADS进行射频电路设计和仿真的基础知识和方法。本书内容涉及射频电路的基础理论、ADS的基本概况以及
2017-10-17 18:05:35
单管共射放大电路设计(100)
1按图连接电路,设置合适的静态工作点,输出不失真;(20)
2测量静态工作点;(20)
3测量电路放大倍数;(20)
4测量电路的带宽;(20)
5电路工艺优良,连接
2016-03-29 14:33:04
`编辑推荐 毕查德·拉扎维编著的这本《国外名校较新教材精选:模拟CMOS集成电路设计》是加州大学洛杉矶分校(UCLA)的新教材。《国外名校较新教材精选:模拟CMOS集成电路设计》组织严谨,内容丰富
2017-12-20 17:57:10
国外最新应用电路设计精选
2012-05-11 15:36:55
如何实现基于NFC的无线通信系统电路设计?
2021-12-20 07:54:39
`实用电子电路设计制作详解`
2015-10-21 15:23:39
` 本帖最后由 gk320830 于 2015-3-7 17:57 编辑
小家电电路精选300图集`
2012-08-16 16:03:11
开源电路设计STM32最小系统电路的知识点汇总,绝对实用
2021-12-17 06:12:34
锂离子电池管理系统的设计也会做详细的说明。10场系列直播、价值199元前500名、限时0元抢!十大知识点详解十场直播、多个知识点,助力高效学习电路设计。内容涵盖目前主流电源类型介绍,双直流电源DC-DC
2022-05-12 11:21:46
怎么实现51单片机最小系统电路设计?
2021-11-08 07:25:22
嵌入式车载网络系统的硬件电路设计嵌入式车载网络系统的驱动程序设计
2021-05-19 07:10:40
`非常不错很多款电路设计原理图 详解`
2012-10-11 15:20:27
;><font face="Verdana">电工电子基础精选电路详解本书包括:电路基础、模拟电子电路、数字电子电路三部
2009-02-13 14:47:48
电机驱动电路设计详解 电机的控制根据需求不同,有单向控制转动,也有双向控制转动,有需要调节速度的,也有不需要调节速度的。如果需求只是单向转动的电机,那么驱动只用一个大功率三极管或场效应管或继电器直接
2016-01-27 14:10:15
详解直流电机驱动电路设计
2021-01-21 07:39:32
详解直流电机驱动电路设计
2021-01-25 06:44:41
电力电子电路精选 ——常用元器件·实用电电力电子电路精选 ——常用元器件·实用电下载介绍:电力电子电路精选 ——常用元器件·实用电路·设计实例
2006-03-15 09:21:05 0
0 新型电子电路应用实例精选新型电子电路应用实例精选下载介绍:新型电子电路应用实例精选
东西是非常不错的,可供参考.
2006-03-15 09:39:040 电工·电子基础精选电路详解本书包括:电路基础、模拟电子电路、数字电子电路三部分。
2008-11-04 14:15:58212 小家电电路精选小家电电路精选精选了微波炉、电饭锅、电热锅、洗碗机、电子消毒柜、电热水瓶、饮水机、热水器、电暖器、抽油烟机、电风扇与空调扇等18个品种近400幅普及率
2008-11-07 14:39:54580 联创电路设计系统个人版 2.0,挺好用的电路设计软件。
2009-03-21 11:30:100 嵌入式车载信息系统应用-硬件基础:硬件选型与最小系统电路设计
硬件选型与单元电路设计 电源电路 晶振电路与复位电路 Flash存储器接口
2010-01-25 08:25:1446 电子捕鱼器实绘电路精选
2010-05-31 11:57:17838 电子发烧友为您提供了车载电源系统结构电路!
2011-06-29 18:38:291421 
《新型电子电路应用实例精选》精选了国内外刊物上及编者多年实践设计的电子电路500多例。《新型电子电路应用实例精选》实例精选包括放大器电路、转换电路、信号发生电路、波形
2011-08-03 16:55:550 电子发烧友网站提供《[趣味生活电路精选].晓帆.扫描版.txt》资料免费下载
2014-07-16 18:22:180 实用电子电路设计制作详解,电子基础实用电子电路设计制作详解
2015-11-17 11:44:000 电机控制与驱动电路设计中模拟信号隔离技巧详解
2016-01-06 17:28:450 硬件电路设计具体详解。
2016-04-05 11:51:2328 射频集成电路设计基础讲义原理详解!适合新人和初学者!
2016-09-09 16:58:090 此模拟电路设计为麦克风接口电路的技术领域,特别涉及车载语音识别系统的麦克风电路解决方案,此设计提供了一种抗干扰并确保高信噪比的麦克风电路接口设计方案。
2017-01-22 13:20:259 电路设计--电路定理
2017-02-28 22:50:530 电工书架:最新实用电路精选.王建.扫描版
2017-03-01 21:43:200 电路设计--电路的相量图
2017-08-07 09:35:370 电路设计--一阶电路
2017-08-07 09:39:250 本文为大家带来五种三人表决器电路设计方案,包括两款仿真电路及程序分析,三款逻辑电路设计的原理详解。
2018-01-17 18:49:21298039 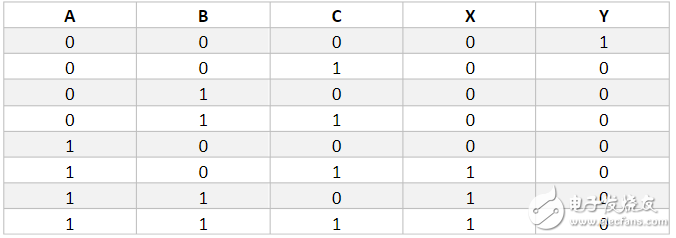
本文主要介绍了常见led驱动电源电路设计大全(十款电路设计原理图详解)。led驱动电源是把电源供应转换为特定的电压电流以驱动led发光的电源转换器,通常情况下led驱动电源的输入包括高压工频交流(即市电)、低压直流、高压直流、低压高频交流(如电子变压器的输出)等。
2018-01-25 10:13:28196101 
本文主要介绍了单片机3.3V驱动继电器电路(四种电路设计原理图详解)。继电器是一种电控制器件,是当输入量(激励量)的变化达到规定要求时,在电气输出电路中使被控量发生预定的阶跃变化的一种电器。它具有控制系统(又称输入回路)和被控制系统(又称输出回路)之间的互动关系。
2018-01-25 16:25:4981967 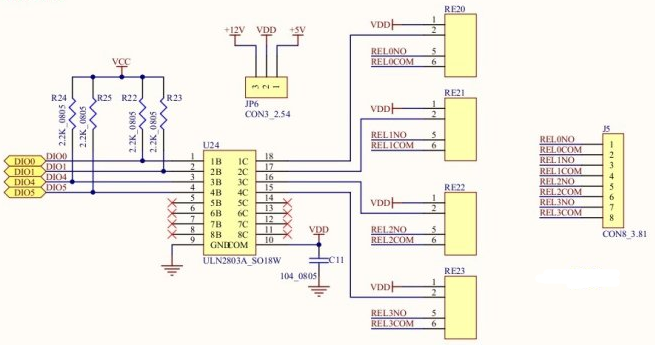
本文主要介绍了简单的4×4行列式键盘控制电路设计(三款电路设计原理图详解)。键盘系统的主要工作包括及时发现有键闭合,求闭合键的键码。根据这一过程的不同,键盘可以分为两种,即编码键盘和非编码键盘。编码
2018-01-25 16:38:3763837 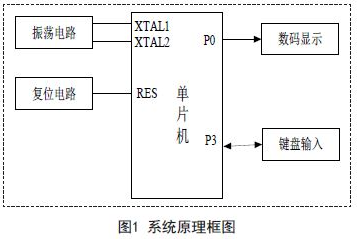
本文主要介绍了停电报警器电路设计方案汇总(五款模拟电路设计原理图详解),方案三分析了大部分电冰箱没有延时断电保护器,市电偶尔断电,瞬间又恢复供电,会对电冰箱造成不利影响,而白天又不易发现停电
2018-01-28 10:20:0935117 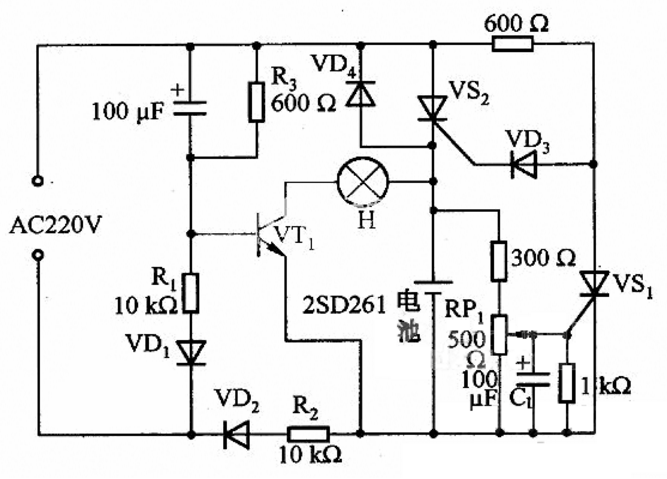
本文主要介绍了555报警器电路原理图(八款模拟电路设计原理图详解)。基于555的简易防盗报警器的设计,本电路由四部分组成:检测电路、定时、分频、报警。检测电路是用555设计成的,其2管脚连接一个触摸
2018-01-28 11:37:13127532 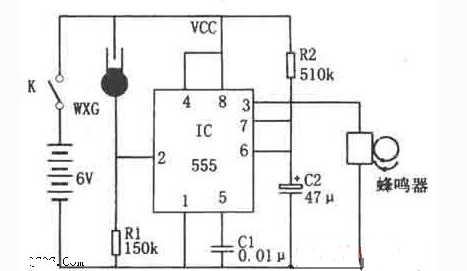
本文主要介绍了声光报警器电路设计方案汇总(五款模拟电路设计原理图详解),声光报警系统基本原理是单片机按照晶振电路给出的时钟时序下接收来自超声波传感器输出的入侵者距离电信号,并将该距离数值在LCD
2018-01-28 12:15:5875943 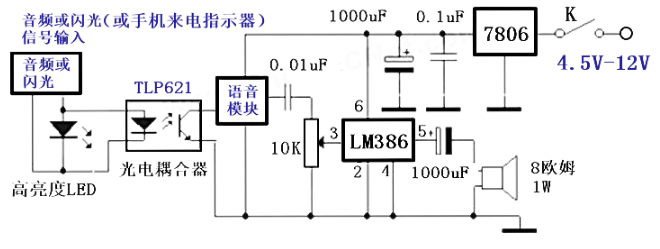
本文主要介绍了超温报警器电路设计方案汇总(六款模拟电路设计原理图详解),方案一中超温报警电路由温度采集电路、继电器控制电路、延时电路、秒脉冲信号发生器、计数译码电路、数显电路、报警电路共同
2018-01-29 10:10:2729657 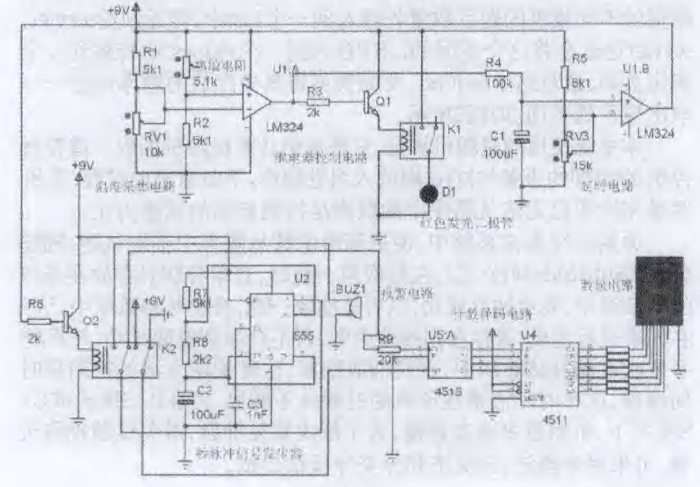
本文主要介绍了计数报警器电路设计方案汇总(多款模拟电路设计原理图详解),方案二主要由直流电源电路(整流、滤波、稳压电路)和计数报警电路(计数电路、译码电路、显示电路、声光报警电路)组成,:声光报警功能用蜂鸣器和LED灯实现,控制LED报警十秒,蜂鸣器报警10秒。
2018-01-29 10:30:0723163 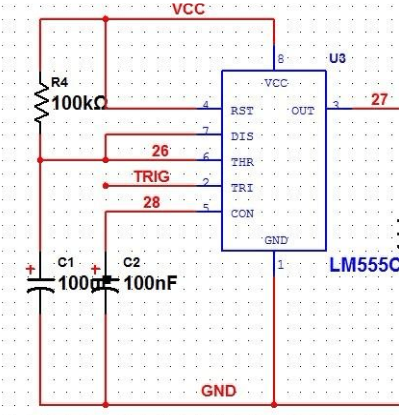
本文主要介绍了三路抢答器电路设计方案汇总(三款模拟电路设计原理图详解),时序控制电路是抢答器设计的关键,它要完成以下三项功能:主持人将控制开关拨到“开始”位置时,扬声器发声,抢答电路和定时电路进入
2018-01-29 11:41:5574437 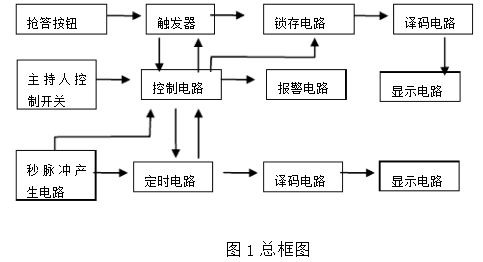
本文主要介绍了四人抢答器电路设计方案汇总(六款模拟电路设计原理图详解),四人抢答器的功能是每位参赛者有一个抢答按键,按动按键发出抢答信号;竞赛主持人有一个控制按键,用于将抢答信号复位和抢答开始;竞赛
2018-01-29 12:31:23319020 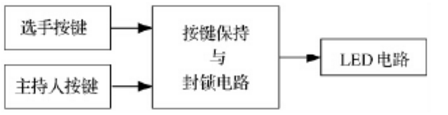
本文主要介绍了220遥控开关电路设计汇总(五款模拟电路设计原理图详解),方案三抽油烟机自动控制电路由气敏传感器和W1组成燃气检测电路组成,电源变压器输出的交流5V电压给气敏传感器加热丝加热。反相器
2018-01-29 17:20:4413519 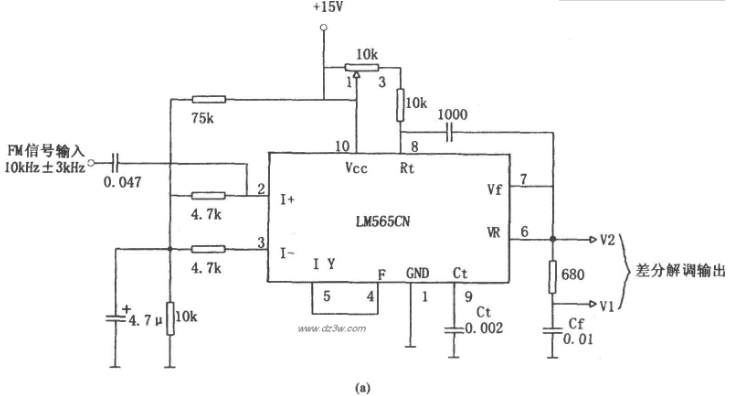
本文主要介绍了电子秤设计电路图汇总(六款模拟电路设计原理图详解)。电子秤是衡器的一种,是利用胡克定律或力的杠杆平衡原理测定物体质量的工具。按结构原理可分为机械秤、电子秤、机电结合秤三大类。电子秤主要
2018-01-30 10:59:51241263 
本文主要介绍了555电子温控器电路图大全(八款模拟电路设计原理图详解),这是最全的电路设计详解,总有你需要的一款。IC1555集成电路接成自激多谐振荡器,Rt为热敏电阻,当环境温度发生变化
2018-03-26 09:29:0034423 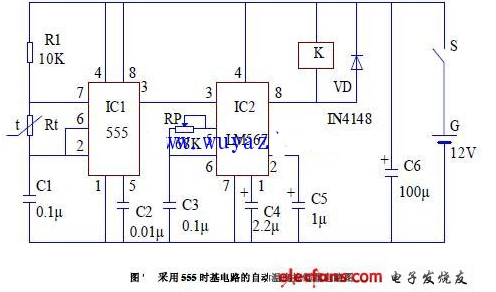
本文主要介绍了A/D转换电路图大全(五款A/D转换电路设计原理图详解)。A/D转换就是要将模拟量V(如V=5V)转换成数字量D(如D=255)。模/数(A/D)转换的型式较多,如计数比较型、逐次逼近型、双积分型等等。在集成电路器件中普遍采用逐次逼近型,现简要介绍逐次逼近型A/D的基本工作原理。
2018-03-26 15:04:00157325 
六款典型窗口比较器电路设计原理图详解
2018-02-27 09:57:1235 本文主要介绍了简单实用的恒流电路图大全(八款简单实用的恒流电路设计原理图详解)。压控恒流源是系统的重要组成部分,它的功能是用电压来控制电流的变化,由于系统对输出电流大小和精度的要求比较高,所以选好压控恒流源电路显得特别重要。该恒流源电路由运算放大器、大功率场效应管Q1、采样电阻R2、负载电阻RL等组成
2018-03-26 08:57:00228077 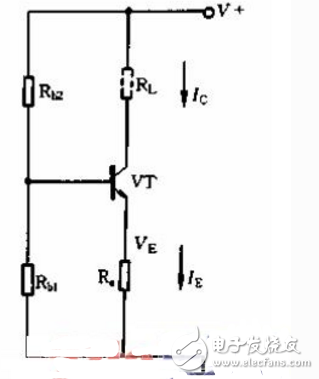
五款9011三级管开关电路设计原理图详解
2018-02-28 14:25:2033 本文主要介绍了光声控灯电路图大全(八款光声控灯电路设计原理图详解)。楼梯灯声光控制开关电路图,主要由声控电路。光控电路。触发及延时电路。控制电路供电电路。受控电路等组成,其实本电路主要用于夜晚或光线
2018-03-02 09:10:43159712 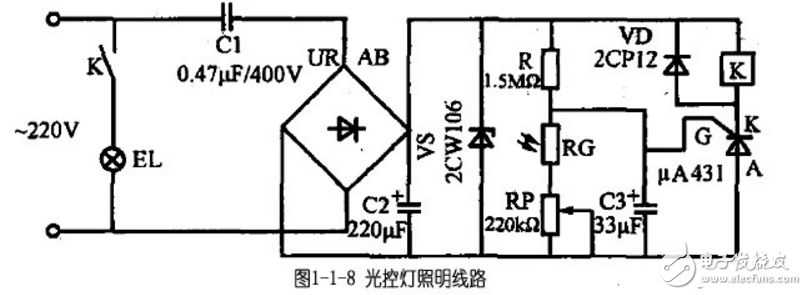
本文主要介绍了无线遥控车电路图大全(四款无线遥控车电路设计原理图详解)。该集成电路具有5种控制功能,即前进、后退加速、左转和右转等。由于采用了编码发射及解码接收电路,所以具有较高的抗干扰性能。在遥控
2018-03-06 13:48:17228783 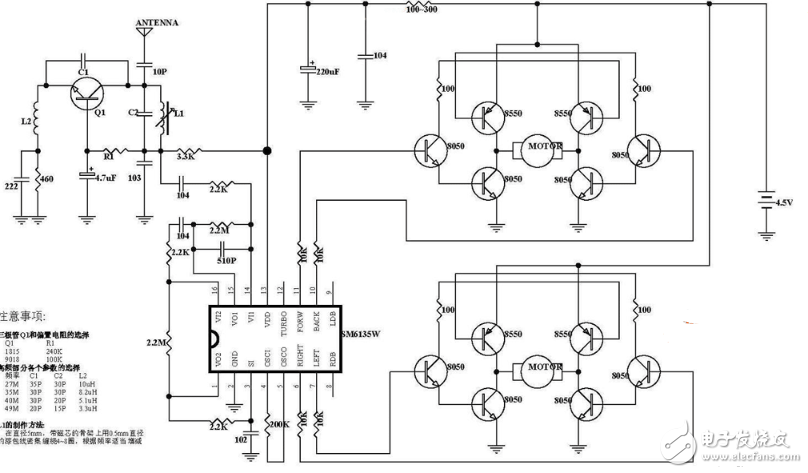
.docx DC-DC升压电路.docx FPGACPLD数字电路设计经验分享.docx MIC电路工作总结.docx MOS管驱动电路详解.docx PCB电路设计指南(经典).docx PLC输出电路
2019-01-11 18:19:380 【方案精选】比特斯拉更安全的车载系统!大联大推出基于NXP的车用Android Auto车载系统解决方案
2019-06-27 19:39:444347 DN57-视频电路集合
2021-04-28 17:51:073 智融SW3523车载快充电路设计方案
2021-08-14 11:01:1085 推挽逆变车载开关电源电路设计(南方电网通信电源技术规范)-推挽逆变车载开关电源电路设计
2021-08-31 10:10:3555 电工电子基础精选电路详解教材免费下载。
2022-04-08 11:28:330 各位电子工程师们,专属于你们的福利来啦!本周专栏精选内容是电路设计相关的原理分析、设计技巧、学习笔记以及项目实例。给大家选取的都是发烧友专栏最新的推荐内容,提供给各位电子院校学生、电子工程师及学者
2022-04-06 15:52:32278 
电子发烧友网站提供《单片机车载超级电容测试系统电路设计.pdf》资料免费下载
2023-10-10 11:08:130 电子发烧友网站提供《PIC16C57的滚动码遥控安防系统电路图设计.pdf》资料免费下载
2023-11-06 08:31:320 电子发烧友网站提供《一种推挽逆变车载开关电源电路设计方案.doc》资料免费下载
2023-11-14 14:23:150 电子发烧友网站提供《车载AM/FM收音机电路设计.doc》资料免费下载
2023-11-20 11:33:162 拖动系统基本控制电路详解
2023-12-13 09:19:22206 
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论