军用/航空电子

一文解析引信系统技术 无线电接近引信的工作原理
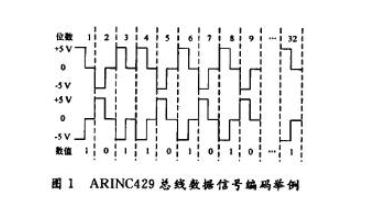
在多普勒型引信中,致动信号是由相对于引信移动的目标反射的波产生的。由于引信和目标的相对速度,反射波的频率与透射波的频率不同。

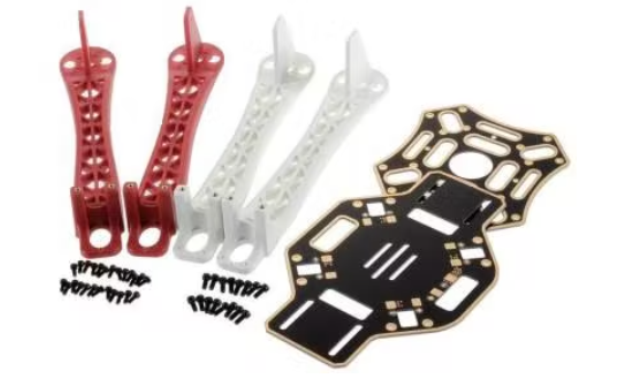
浅析四轴无人机的结构与基本飞行原理
( 四轴飞行器结构图) 参照飞行状态表变化电机转速,由于四个电机转速不同,使其与水平面倾斜一定角度,如图l所示。四个电机产生的合力分解为向上的升力与前向分力。
雷达接收的回波功率计算方法
假设雷达波束范围内距离R处有一个目标,电磁能量遇到目标后会被散射到不同方向,其中有部分能量后向散射到雷达,作为回波被雷达天线(有效孔径Ae)接收到,用σ来衡量目标反射电磁波的能力,叫做雷达截面积。
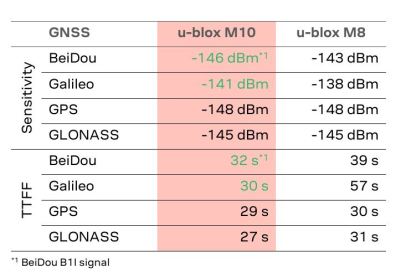
解析用于可穿戴设备和工业的导航卫星GNSS平台u-blox ...
u-blox 推出了 M10,这是其最新的 GNSS(全球导航卫星系统)平台,完全由内部设计,用于低功耗定位应用。 u-blox M10 适用于广泛的应用,例如运动手表或货物和牲畜追踪器,所有这些都具有小尺寸和非常长的电池寿命。 摩天大楼限制了天空的一部分。 因此,GNSS 接收器视线范围内的卫星数量(城市峡谷)使得 GNSS 接收器极难锁定轨道上卫星发出的信号足够长的时间以连续定位自身。 增加卫星的数量可以产生显着的差异。 新的 M10 u-blox 定位平台可以同时从
【Aigtek水声功率放大器应用】浅谈潜艇综合声呐系统利用什...
潜艇综合声纳系统是指在潜艇上,由多部声纳和水声测量设备组成的、具有综合化功能的水声探测系统。现代潜艇综合声纳系统通常由被动测距基阵、艇首阵、侦察水听器阵、通信阵、勺侧线列阵、拖曳线列阵、本艇噪声监测水听器、通用信号处理机、通用多功能显控台等组成。有的系统还包括一部拖曳式线列阵声纳。 潜艇综合声纳系统通常具有以下功能:对目标进行搜索、跟踪、测向、测距和识别;对声纳冲源实施侦察、定位和波形参数测定;主动发射脉
基于MSP430F449单片机的雷达导航仪智能测控系统设计方...
雷达导航仪智能测控系统以单片机为核心,控制测控系统的数据发送、转换、接收、显示等功能。
无人机空中移动性管理分布式控制框架
2020年10月20日,Top Talk邀请到了北京航空航天大学全权老师,请他带来题为《基于时空大数据的空中高速公路:一种城市空中移动性管理分布式控制框架》的分享。本文系全权老师分享的文字实录,希望能对大家有所帮助或者启发。 全权|北京航空航天大学 全权,北京航空航天大学副教授,多伦多大学客座教授。长期从可靠飞行控制。作为第一作者,完成英文著作三部,发表文章近百篇。获第二届全国高校自动化专业青年教师实验设备设计创客大赛金奖
2020-11-11 标签:无人机 1410
Dragonfly Pictures 公司开创新一代多旋翼无...
早期对系留无人飞艇的实验暴露出了一个基本挑战,那就是它们在强风条件下,相对而言无法保持静止不动。
Vicor电源模块为佰才邦系留无人机提供强大动力源
佰才邦作为通讯领域的优秀企业,近几年来在系留式多旋翼无人机系统方面的发展取得了显著成绩。
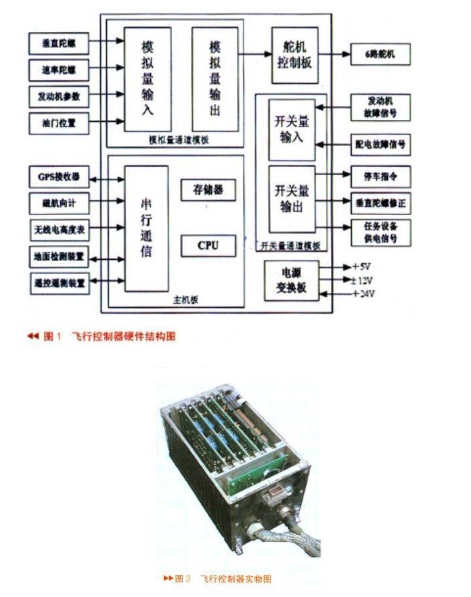
无人机飞行控制器仿真电路设计
在半实物仿真试验中,飞行控制计算机的控制信号通过D/A转换后,经过伺服控制驱动器放大来驱动无人机的执行机构即电动伺服舵机,然后仿真计算机通过A/D通道采集电动伺服舵机的位移信号,并且输出控制指令(三轴姿态角)控制三轴飞行仿真转台,模拟出无人机的姿态角及姿态角速率等信号。
ITECH无人机测试解决方案,UP你的续航极限!
相比于普通的无人机,太阳能无人机载重更大、飞得更高、续航更长、稳定性和抵抗性更强,这些属性让其能够成为理想的军用工具。

射频信号分析仪的应用案例简介
航空无线电领域占用频段十分宽阔(10KHz-9400MHz),信号调制方式多样。目前普遍的做法是不同的系统用不同的测试设备,彼此间较少通用。而应用软件无线电的概念,用通用化的硬件和开放的软件环境,可以为研究开发提供通用无线平台,降低开发成本和周期;降低投资风险,提高经济效益;为最终用户提供了一个通用的终端设备平台。
2017-12-09 标签:软件无线电 2927
全球有哪四大卫星定位系统?谁更胜一筹?
全球卫星导航系统是指能在地球表面或近地空间的任何地点为用户提供全天候的3维坐标和速度以及时间信息的空基无线电导航定位系统,其原理是卫星至用户间的距离测量是基于卫星信号的发射时间与到达接收机的时间之差,称为伪距,为了计算用户的三维位置和接收机时钟偏差,伪距测量要求至少接收来自4颗卫星的信号。














编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |





 工商网监
工商网监